 我要投稿
我要投稿

在 AlphaGo 2:0 领先李世石后(围棋人机大战赛程安排),大家的对于这场世纪之战最终结果的关注下降了很多,更多的是关于人工智能会不会对人造成威胁的讨论。然而,在谷歌眼里,考虑人工智能对人类的威胁还为时尚早,他们要做的是如何使用深度学习和人工智能塑造未来。早前,谷歌已经宣布将应用人工智能拓展到医疗领域,那么医疗之后谷歌的人工智能下一站再哪里?
就在最近,谷歌研究人员分布了一份题为机器人使用大量数据和深度学习来学习手眼协调(Learning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data Collection)的研究报告,这份报告显示,Google 的研究人员正试图让机器人像人一样认识世界,这意味着机器人要进行大量的练习。研究员 Sergey Levine 和他的团队对 14 台机器人手臂进行试验,这 14 只手臂相互连接,研究人员使用卷积神经网络(CNN,Convolutional Neural Networks)让这些机器人自主学习如何抓取小物体,如杯子、胶带座和柠檬绿的玩具海豚。

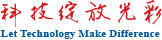
图:大数据收集设置,包括14个机器人手臂。研究人员收集80万次机器人尝试抓取物体的数据来训练卷积神经网络模型
传统的机器人依靠人类事先编制的程序来执行特定的任务。但是,谷歌的新方法通过让机器人反复试验来学习执行任务的方法。
经过一年训练的手臂现在可以自己抓取并捡起小物体,但是让不同的机器学习同一样任务是很困难的。机器人的手臂的编程信息通常是用来识别物体并按照预定的程序做出反应,无法像人类一样根据周围的环境做出改变。对于发生在可预测地点的任务和机器已经学习过如何抓取的物体,这是一种好方法。但是机器人可以抓取训练之外的其他从来没有见过的物体吗?谷歌研究人员的想法是,让未来的机器人能够与它们从来没有遇到过的对象进行交互,无需预先设置程序,从而缩小机器人与人类在感觉运动技能之间的差距。
为了探究这一点,研究人员让机器人手臂伸入随机装满物体的盒子里,让它们凭借运气随机抓取物体。在一天之后,研究人员收集机器人尝试抓取物体的数据,然后用这些数据训练神经网络,让抓取物体的结果更加理想。在 80 万次抓取行动之后,机器人手臂就可以自动纠正自己的行动了。很快他们就可以更加顺利地抓取物体了,甚至会采用某种策略,如推开一个物体去抓取另外一个物体,或者去抓取柔软的物体而不是坚硬的物体等。
手臂的所有这些行动没有研究人员编写系统告诉它们怎么抓取物体。使用反馈环路,它们可以将抓取物体的失败率降低到 18%。这些研究人员打算将他们的研究扩展到更宽的领域中,然后在实验室之外的其他多种真实环境中进行尝试。
研究报告下载:
(本文部分内容参考36Kr)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 深度学习
- 机器训练










 赞 0
赞 0
 回复
回复