 我要投稿
我要投稿导语:北京时间2017年3月27日,国际顶级机器人与自动化公司FESTO在德国斯图加特召开新闻发布会,发布了与北京航空航天大学合作研制的仿生机器人样机:软体章鱼触手机器人(Soft Robotic Octopus Gripper)。
软体章鱼触手机器人原理样机的设计、制造、力学分析由北航机械工程与自动化学院博士研究生谢哲新完成,控制系统由硕士研究生龚哲元完成,FESTO的Elias Knubben博士进行了视频拍摄与后期编辑。项目负责人为北航机械工程及自动化学院、国际交叉科学研究院仿生软体机器人实验室文力副教授。
▍仿生科学的乐趣
造物主总是给予每一个物种独特的看家本领,科学家们就尝试学习这样的技术,希望能为人类社会所用。从鲨鱼皮到章鱼触手,生物体精细而巧妙的结构激发文力老师不断去探索,去挑战。鲨鱼皮在高效游动中表面微结构所发挥的新的流动物理机制也是当前仿生学、新材料与机械制造领域国际前沿理论研究热点问题之一。2014年,他以第一作者和第一通讯作者的身份在《The Journal of Experimental Biology》杂志发表有关“3D打印人造仿生鲨鱼皮”的文章。
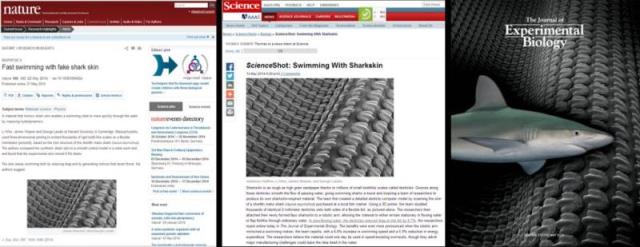
图:文力老师发表的《Swimming with shark skin》
而如今,与FESTO公司合作的软体机器人也正是瞄准了章鱼触手可吸附可抓持的功能特点,旨在为不同形状、大小的物体完成安全无损和有力的抓取,突破刚性机器人的部分先天缺陷。

图:灵活的章鱼触手可以拿不同形状和质地的东西
▍雕琢迭代的细致
科技成果往往都是全新的产品,没有人能知道它具体的模样。章鱼触手也是如此。在已成型的象鼻抓取器的基础上,科研团队不断尝试改进。从无主动吸附力到可主动吸附的吸盘就是改进后的一项增量,这使得章鱼触手兼具缠绕和吸附两种功能。并且,触手的截面从最开始的圆形到半圆形;在章鱼触手外层加各向异性复合弹性纤维,在其内部嵌入各向异性薄片,用以限制仿生软体章鱼触手在弯曲方向外的变形,保证其抓取的精度和重量。
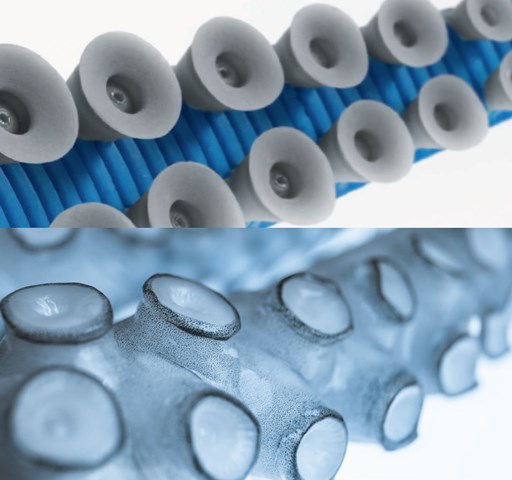
图:章鱼触手细节放大图
最为棘手的问题还是对软体材料的选择,使用“既是软的又不能太软”的材料能够更好地实现控制系统,并能够抓取相对较重的物体,从而满足实际的生产需求。在这个过程中,团队不断尝试材料的性能,经过近十个版本的迭代与完善,如今这个只有190g的触手已经实现可以抓取1kg的物体。然而这只是一个阶段性的成果,他们希望这个触手能够同时适应较轻和较重的物体,以及形状较大和较小的物体,从而更好地服务于各个领域。
▍服务人类的愿景
与Festo公司的合作,正是将科研成果从象牙塔推向社会实践的典型成功案例。近日,软体章鱼触手机器人在汉诺威工业展亮相,并引起公众、工业、学术等各界人士的兴趣。本届汉诺威工博会的主题为“融合的工业——创造价值”。

图:仿生软体机器人亮相汉诺威工业展
德国总理安格拉·默克尔(Angela Merkel)与波兰总理贝娅塔·希德沃(Beata Szydlo)详细地了解了仿生软体机器人在未来的工业操作、人机共融交互等领域的应用前景。麻省理工科技评论(MIT Technology Review)、美国有线新闻网(CNN)等科技网站与媒体先前对软体章鱼触手机器人进行了详细报道。文力老师与德国FESTO也进一步探讨了下一步的仿生软体机器人合作研究计划。他们将从真实的社会需求出发,在现有的技术上不断雕琢改进,并在理论上探寻更大的突破,更大程度地优化我们的生活和生产。
(本文来源:北京航空航天大学新闻网;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 北航
- 软体机器人











 赞 3
赞 3
 回复
回复