 我要投稿
我要投稿基于高精度地图和单目视觉传感器的车辆自定位技术
▍01.成果简介
在智能汽车系统中,车辆高精度的自定位技术是实现车辆决策、控制的重要前提。现有车辆定位方法中,传统卫星定位(GNSS)精度难以满足智能汽车需求;RTK-GPS技术虽能在空旷环境中实现较高精度定位,但是在城市复杂场景中,因信号遮挡或反射,使得该方法精度不够理想;航位推算(DR)技术与GNSS结合的方法虽然能一定程度上弥补卫星定位的误差,但是在长期信号不稳定的情况下,误差累积效应使得该方法不能满足智能汽车城市场景定位需求。
地图匹配技术是另一种车辆自定位技术,依靠车载传感器和事先采集的地图进行匹配,从而得到车辆在地图中的位置。以该方法为原理的高精度定位技术中,使用激光雷达传感器的匹配算法是常用方法,但是激光雷达成本较高,对相应地图的数据量要求非常大,使得匹配算法对动态环境的变化(如其他车辆遮挡)较敏感。而结合多目立体视觉、深度相机等测距传感器的地图匹配技术,虽然成本相对较低,但测距精度较低导致自定位效果较差,且同样无法适应车辆形式场景的动态变化。
本项成果提供一种结合高精度地图和单目视觉传感器的车辆自定位方法,该方法通过视觉传感器与高精度地图的匹配,实现高精度定位。该方法在满足智能汽车高精度定位需求(通常分米级)的同时,降低定位系统的成本,提高车辆在城市动态变化场景中定位的鲁棒性。
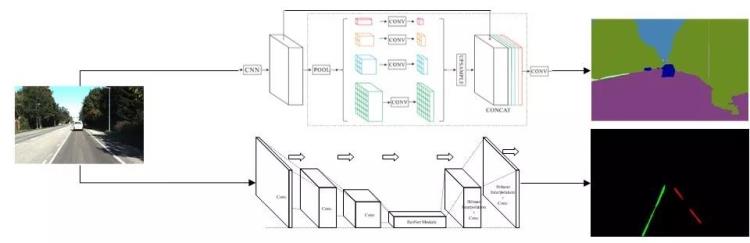
本项成果的车辆自定位视觉处理图
▍02.应用前景
本项成果在理想条件下可达到厘米级的高精度定位,且不依赖卫星通讯,对城市道路中建筑物、树木等遮挡不敏感,更加适合城市道路自动驾驶应用。本成果涉及传感器为视觉传感器和低精度卫星定位系统,整体系统成本较现有高精度定位设备大幅降低,具有很好地应用前景。
▍03.知识产权
本项成果已申请1项国内发明专利。
▍04.团队介绍
项目团队主要研究方向智能车辆及无人驾驶、智能交通及车联网,团队成员包括教授、副教授及硕博士多人,项目负责人为清华大学车辆动态测控技术领域的学术带头人,主要从事智能汽车高精度定位导航及无人驾驶方面的研究。承担重大国际合作课题1项,国家863项目2项,自然科学基金3项,承担其他省部级项目超过20项,共发表文章120多篇,其中SCI/EI检索82篇,获得软件著作权12项,以第1,2发明人获得授权发明专利超过30项,2010年和2013年获得国家技术发明奖2项,此外还获得省部级一等奖2项,省部级二等奖2项。
▍05.合作方式
许可/入股。
▍06.联系方式
电话: 010-62792574
邮箱:zhangyan2017@tsinghua.edu.cn
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 清华大学
- 定位系统