 我要投稿
我要投稿成果简介
本成果涉及一种多模态触觉感知装置,属于机器人传感器技术领域。与人类相似,机器人感知外界环境最真实、稳定、便捷的方式便是通过机器人手触摸,机器人手的感知能力决定了机器人是否能够正确认知外界环境以及机器人的操作精度、成功率等。在新一代机器人手中,传感装置已逐渐趋于阵列化、多功能化和集成化。目前常见的触觉传感器有压阻式、电容式、光电式等,它们都存在密度难以提高、电路处理复杂等问题。为了克服以上不足,近年出现了基于视觉的触觉传感装置,具有结构简单、信息丰富等优势。目前基于视觉的触感装置仍存在性能提升空间。
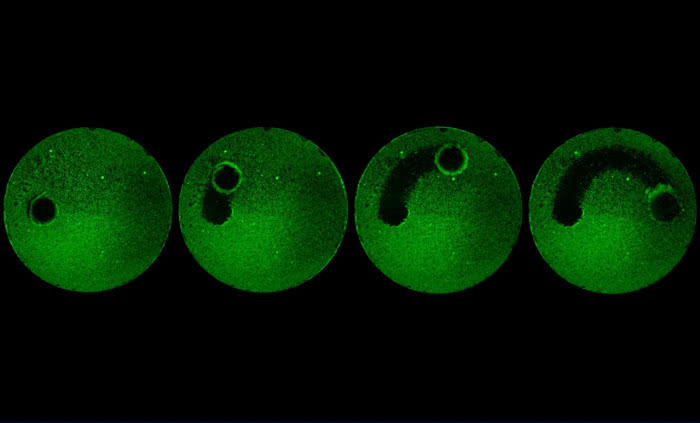
本项目将感温变色油墨材料应用于触感装置,感知机器人操作过程中的温度[1]。同时提出一种基于微视觉的触觉三维力检测方法,通过采集触觉接触区域内弹性体的形变图像的变化,采用一系列图像处理方法,并且使用神经网络拟合的技巧,定性并且定量的刻画物理世界中的触觉、滑觉等,从而提供了一种多模态触觉感知装置,可以得到三维接触力、接触物体表面的温度及纹理等多种模态信息[2]。本装置打破了传统触觉感知装置单模态信息采集的现状,可在同一感知装置中集成受力、纹理、温度等信息的测量,检测触觉、滑觉、压觉三维接触力,获得高精度的接触纹理信息,实现了多模态信息的测量,并将这些信息综合到对一个物体的识别、抓取操作中,使机器人更加智能化、人性化。本装置具有实时性好,检测稳定,检测误差小,检测精度高的优点。
应用前景
本成果技术可应用于工业机器人、智能机器人、人机协作、医疗康复等领域,应用前景广泛。
知识产权
本成果核心技术已申请发明专利3项。
团队介绍
项目团队致力于研究具备自主决策和学习能力的机器人操作技能学习系统。团队包括孙富春、方斌、刘华平、宋亦旭四位教师,专注智能机器人灵巧精准操作研究,研制了拟人触觉的传感装置、多模态穿戴交互装置、残疾人假肢灵巧手、仿人感知灵巧手和变刚度软体手,在本领域发表论文40余篇,申请专利20余项,获得IROS2016机器人灵巧操作比赛冠军、IROS2017服务机器人操作比赛亚军、WRC2016最佳科技创新奖等。同时团队和河北清华发展研究院合作成立了人工智能及机器人研究中心,共同推动智能机器人的产业化发展。
合作方式
技术许可。
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 成果发布
- 多模态
- 触觉感知